|
《静止无功补偿器的模糊神经元PID电压控制》
2018-11-16
周晓华1, 刘胜永1, 王荔芳2, 李振1, 张银1 1. 广西科技大学电气与信息工程学院,广西 柳州 545006;2. 昆明学院自动控制与机械工程学院, 云南 昆明 650214
摘要:针对传统PID控制应用于静止无功补偿器电压控制系统所体现出的快速性与稳定性之间的矛盾,以及较差的自适应能力和鲁棒性的缺陷,采用神经元控制和比例控制设计了1种变结构PID控制器,并采用模糊控制实现该变结构PID控制器参数K。、Kd:~Ki的在线调整。仿真结果表明,将所设计的模糊神经元PID控制器应用于SVC电压控制系统,能有效、快速地补偿系统的无功功率.可更好地买现电力系统电压的稳定控制作用,且控制系统具有较快的响应速度、较好的动态和静态稳定性、较强的鲁棒性及自适应能力。 关键词:静止无功补偿器(SVG);模糊控制;神经元控制;比例控制;变结构PID
0 引言 静止无功补偿器(static var compensator,SVC)通过吸收或向电网输送可连续调节的无功功率,可实现电网的调相和调压、提高线路的输送能力。基于晶闸管控制的SVC由于具有投资小、可靠性高、容量大、损耗低、补偿迅速及调压效果好等显著优点,在电网中得到了较为广泛的应用。 传统PID具有广泛的适用性,控制器结构简单,且需要确定的控制器参数较少。在SVC工程应用中占据着主导地位。但SVC控制系统是一个复杂的非线性系统,传统PID无法同时满足快速性与稳定性的要求。为突破传统PID在SVC控制系统中的制约,将传统PID与现代控制方法相结合成为SVC控制的研究热点。文献设计了1种基于神经元变结构PID的SVC电压调节器,该调节器用神经元控制和比例控制实现变结构PID控制,用另1个神经元控制器实时调整变结构PID控制器参数,有效加快了控制系统响应速度.实现了SVC灵活快速的电压调节功能。本文将模糊控制、比例控制和神经元控制相结合,设计了1种模糊神经元PID的SVC电压调节器,该调节器用神经元控制和比例控制实现变结构PID控制,然后用模糊控制实时调整变结构PID控制器参数。Matlab仿真结果表明,与文献神经元整定方法相比,基于模糊神经元PID电压调节器的SVC控制系统具有更强的自适应能力和抗干扰能力,SVC对电力系统电压的稳定控制效果更好。
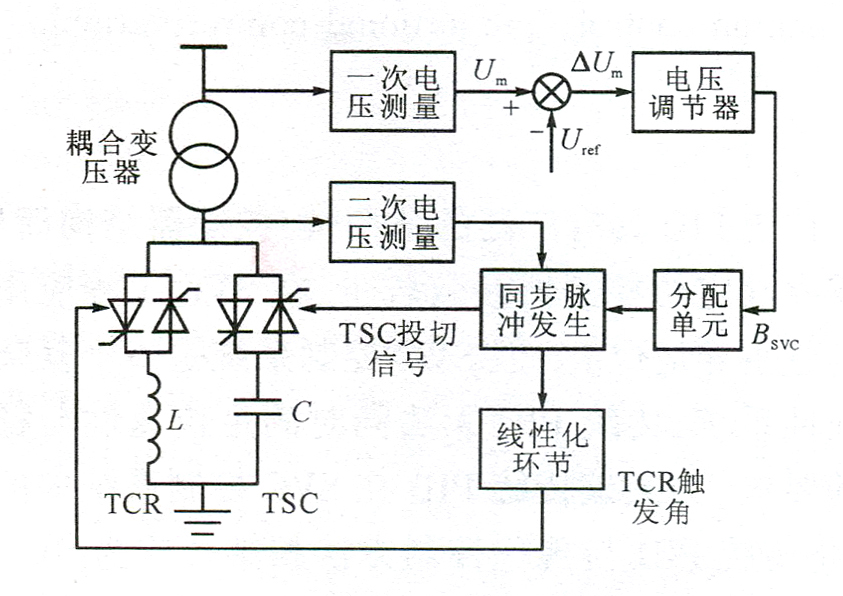
1 SVC基本原理 由晶闸管投切电容器(TSC)和晶闸管控制电抗器(TCR)构成的TSC+TCR组合型SVC,具有较好的输出特性和损耗特性112],是目前应用较为广泛的静止无功补偿装置。其典型结构由1条TCR支路和3条TSC支路构成,为吸收SVC装置产生的谐波,SVC中还设有1条无源滤波器支路。SVC控制原理如图1所示,为简化,图l中只画出了1条TSC支路。电压调节器的输人为SVC一次侧的电压幅值测量值与参考电压幅值的误差△Um,输出为SVC一次侧等效电纳BSVC。分配单元根据BSVC的大小确定TCR触发角α和TSC的通断状态。同步脉冲发生环节根据分配单元计算的TCR触发角α和TSC通断状态产生触发脉冲实现对晶闸管的控制,以实现TSC的投入和切除。当系统节点电压偏低时,投入TSC发出容性无功功率以提升电压;当投入TSC发出容性无功功率过多时,再投人TCR以吸收多余的容性无功功率。
图1 SVC控制系统原理框图
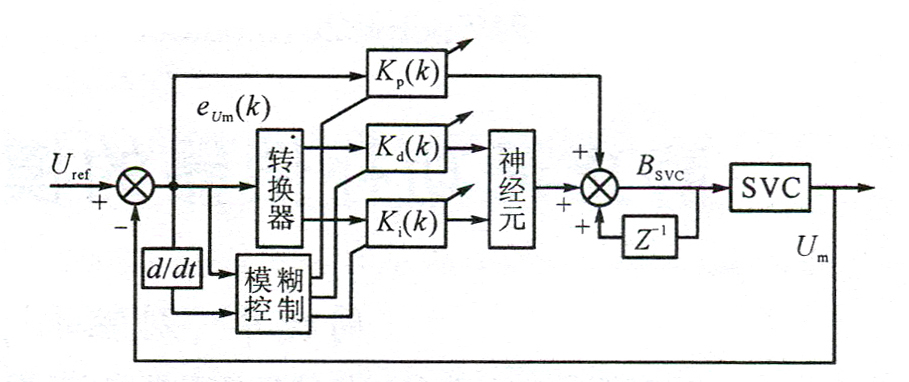
2 模糊神经元PID电压调节器设计 模糊神经元PID电压调节器结构框图如图2所示,图中eum(k)为k时刻电压幅值误差。
图2 模糊神经元PID电压调节器结构框图
取神经元的2个输入状态为
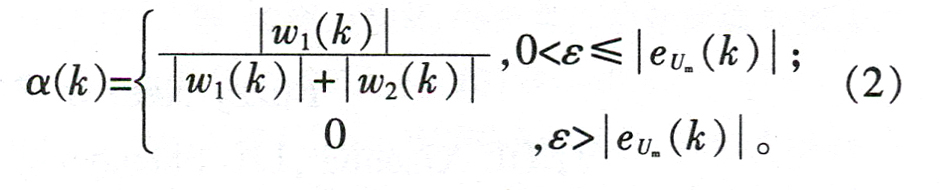
式中:Kd(K)为K时刻的微分系数;KI(K)为K时刻的积分系数;△eum(K)为K时刻电压幅值误差的一次差分;△2eum(K)为K时刻电压幅值误差的二次差分。 设α(K)为K时刻Ki(K)和Kd(K)的调整系数,且
式中W1(K)、W2(K)为K时刻神经元的权值。 神经元权值的调整算法为
式中ηi(i=1,2)为神经元的学习速率。 神经元变结构PID控制器的增量式控制量为
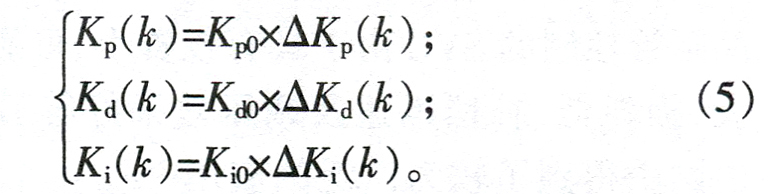
式中:Kp(K)为K时刻的比例系数;BSVC(K-1)为神经元变结构PID控制器在K-1时刻的控制量:K为神经元的比例增值。 由式(4)可知,根据误差大小,神经元变结构PID控制器通过调整a(后)的值以权衡微分、积分环节的控制作用,实现了变结构PID控制,变结构PID控制器参数设置与文献相同。 神经元变结构PID控制器参数Kp(K)、Kd(K)和Ki(K)采用模糊控制在线自动调整。取误差eum(K)和误差变化率△eum(K)作为模糊控制器的输入,输出为神经元变结构PID控制器参数自整定量△Kp(K)、△Ki(K)和△Kd(K)。Kp(K)、Kd(K)和Ki(K)公式为
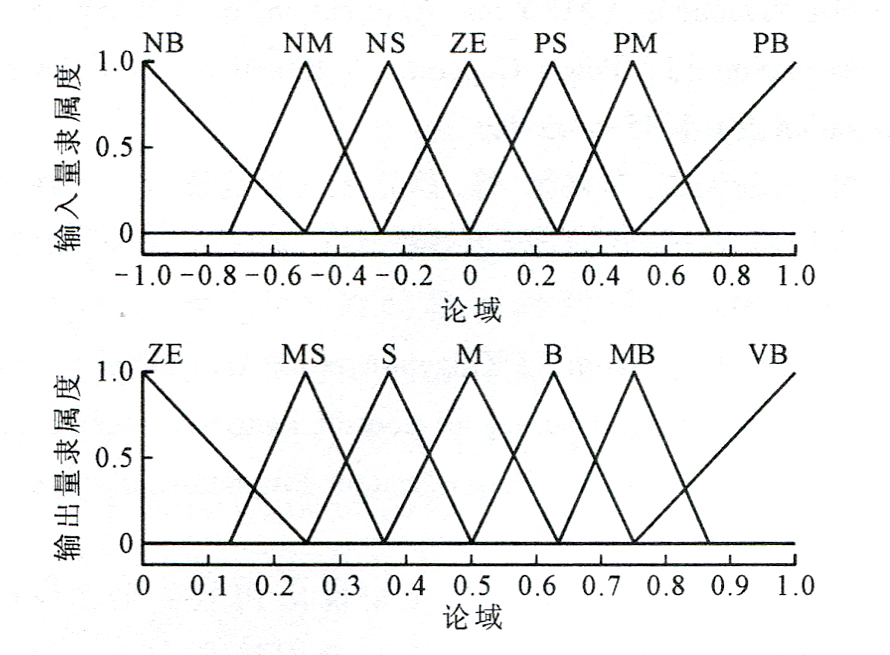
式中KP0、Kd0和Ki0为传统PID控制器参数值。 模糊控制器输入量基本论域定义为(一1,1),模糊子集定义为{NB,NM,NS,ZE,PS,PM,PB),分别代表{负大、负中、负小、零、正小、正中、正大}。输出量基本论域定义为0,1),模糊子集定义为{ZE,MS,S,M,B,MB,VB},分别代表{零、中小、小、中、大、中大、非常大}。输入输出变量均采用三角形隶属度函数,其模糊变量隶属度函数如图3所示。
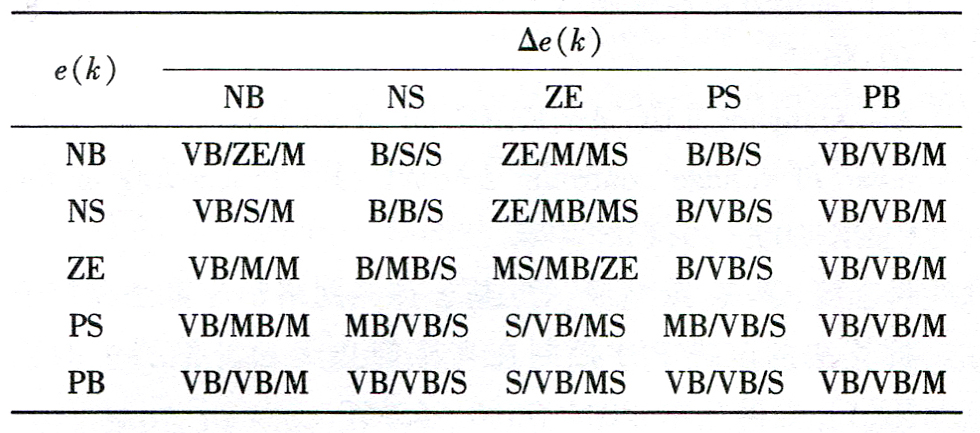
图3 各模糊量的隶属度函数 模糊推理采用Mamdani规则,输出变量△Kp(K)、△Ki(K)和△Kd(K)模糊控制规则见表1。 表1 △Kp(K)、△Ki(K)和△Kd(K)模糊控制规则表
模糊控制器输入量化因子Ke=0.1,K△e=0.5,输出比例因子Ka=6,Kb=0.001,Kc=1。
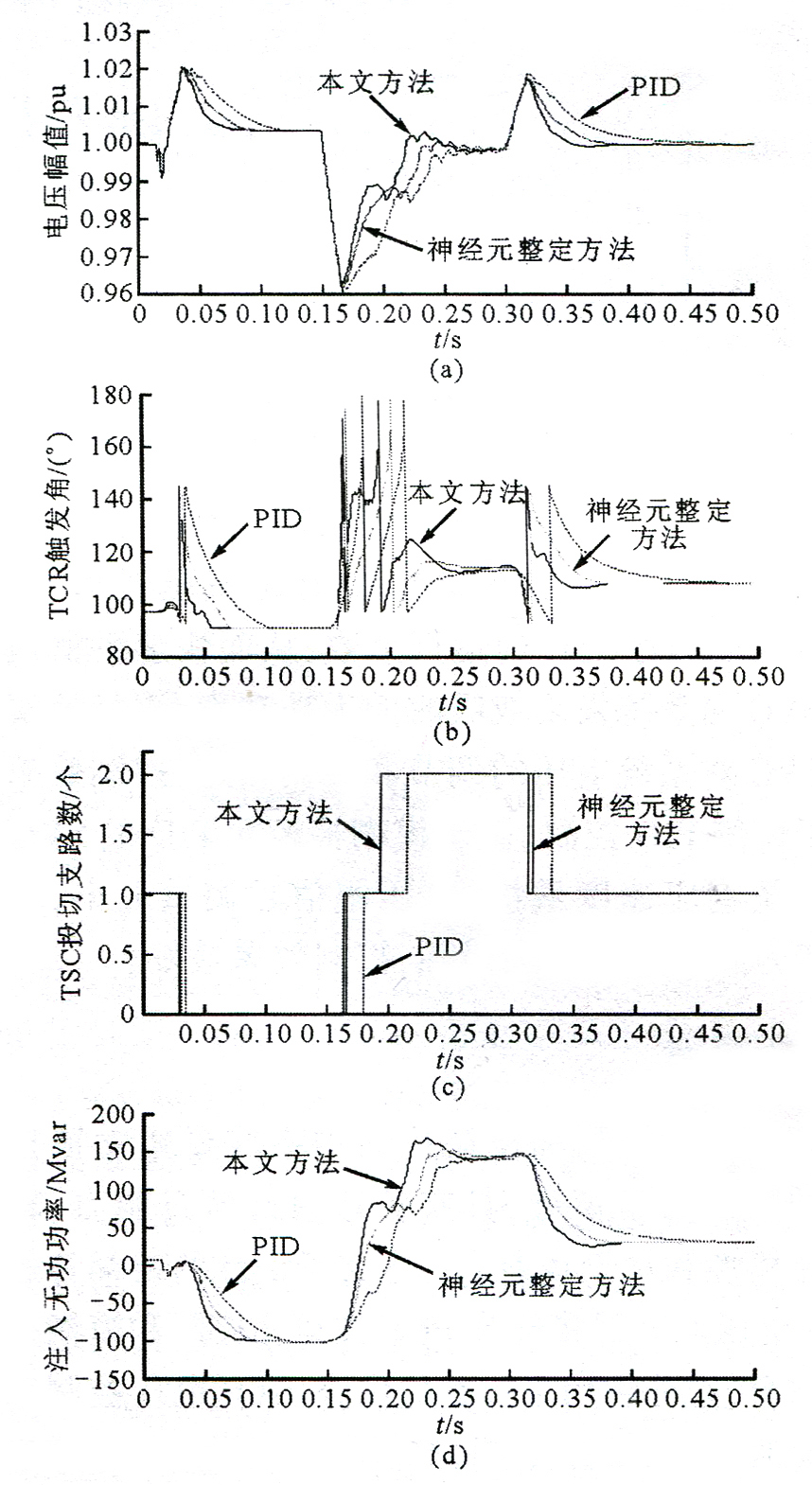
3 仿真与分析 3.1 SVC仿真模型 为验证本文所设计的模糊神经元PID电压调节器的可行性和有效性,选择Matlab电力系统工具箱中的SVC详细模型为实验平台进行仿真研究。SVC仿真模型采用可编程电压源作为系统电源,并向系统提供1个随时间变化的电压以模拟系统电压的变化情况。用串联的RLC支路表示系统负荷,其有功功率为400 MW,无功功率为0。SVC通过1台735 kV/16 kV、333 MVA的耦合变压器并联在负荷侧,SVC由1个109 Mvar的TCR和3个94 Mvar的TSC构成。 3.2 仿真结果 t=O时,电源电压幅值为1.Op.U.;t=0.02 S时,电源电压幅值升高到1.025p.U.;t=0.15 s时.电源电压幅值下降到0.98p.u.,t=0.3 S时,电源电压幅值恢复=到1.0p.u.。参考电压Uref设定为1.0p.U.,3种电压调节器的控制效果如图4所示。
图4 3种电压调节器控制效果对比
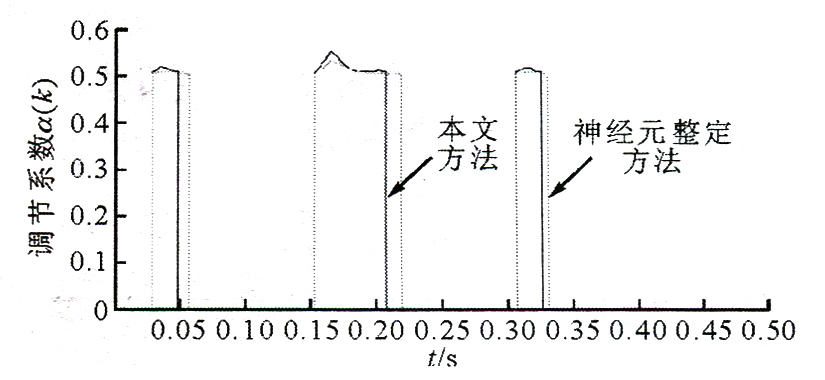
由图4可知.在t=O时系统电源电压幅值为1.0p.u.,TCR触发延迟角约为96°,TSC1投入运行,SVC向系统发出的无功功率为0,SVC接入点的电压幅值维持在1.0p.u.;t=0.02 s时,电源电压幅值由1.0p.u.升高到1.025p.u.,进入稳态后TCR触发延迟角被调节到90°,TSC1被切除,SVC向系统吸收约100 Mvar无功功率,将SVC接入点的电压幅值调回到1.003p.u.;t=0.15 S时,电源电压下降到0.98p.u.,TCR触发延迟角被调节到110°左右,TSC1、TSC2依次投入,SVC向系统发出145 Mvar的无功功率,将SVC接人点的电压幅值调回到0.998p.u.:t=0.3 s时,电源电压恢复到1.0p.u.,TCR触发延迟角被调节到107°左右,TSC1继续运行,TSC2被切除,SVC向系统发出的无功功率约为28 Mvar,SVC接入点的电压幅值稳定在1.0p.U.。 图5所示为2种变结构PID电压调节器的调整系数α(k)变化曲线。在系统电源电压发生变化时,控制器通过调整α(k)的值实现了变结构控制。
图5 调整系数α(K)变化曲线
由仿真结果可知,2种变结构PID的SVC控制系统均能快速、平滑地调节TCR触发延迟角,迅速地投入或切除TSC的运行个数,从而快速平滑地调节SVC向系统发出或吸收的无功功率,更好地实现了SVC对系统电压的调节和控制作用。控制效果均优于传统PID控制。基于模糊神经元PID的SVC控制系统响应速度最快,电压幅值超调量最小,自适应能力和抗干扰能力最强,控制效果最好。
4 结束语 神经元控制和模糊控制均不需要建立被控对象的精确数学模型,具有较好的自学习能力、较强的鲁棒性和抗干扰能力。本文所设计的模糊神经元PID电压调节器将传统PID、神经元控制和模糊控制相结合,充分利用了三者的优势,SVC电压控制系统响应速度快,控制效果良好。同时,在设计模糊神经元PID电压调节器时,有效利用了传统PID控制器参数,为控制器其他参数设定提供了方便。 |